연구활동 및 실적현황
R&D 중장기 Road Map
※ 좌우로 스크롤 하세요.
2018년 ~
R&D 역할 및 조직 정비
- 조직 구조 정비
- 인원, 시설, 환경 조성
- R&D 부문의 명확한 역할 정립
- R&D 개발기반 조성
- R&D 인프라, 성장동력 신사업 확보
~ 2020년
R&D 경쟁력강화
- R&D 기반 확충
- Right People 확보/육성
- 중장기 R&D 투자 전략화
- R&D Outsourcing 확대
- R&D 역량과 인프라 구축
- 인력, 기술, 조직, 지식 등
~ 2022년
글로벌 R&D 시장진입
- 기술개발 역량 극대화
- R&D 성과창출, 확산
- 신기술 개발 및 확보
- 자사 Core기술 확보
- R&D 포트폴리오 최적화
- 성과창출 중심 투자확대
R&D역할정비
성장동력
신사업 확보
R&D 역량과
인프라 구축
신기술(Core)
개발 및 확보
Right People
지속육성
R & D 활동 실적
상륙돌격장갑차 부품 국산화 개발
상륙돌격장갑차 부품 국산화 개발
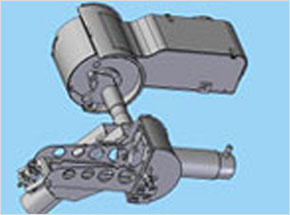



- KAAV 포탑에 40mm 유탄발사기(K4)를 장착하기 위한 맨틀렛 조립체 (mantlet ass'y, 40mm)
- KAAV 포탑에 12.7mm 중기관총(K6)을 장착하기 위한 맨틀렛 및 총 좌 조립체(mantlet/cradle 50cal. ass'y)
- 구동축(drive shaft, mantlet)
- K4 & K6 총기의 장착, 사격 시 고각 및 방위각 조절이다.
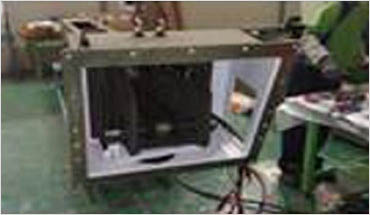
상륙돌격장갑차(KAAV) 동력장치
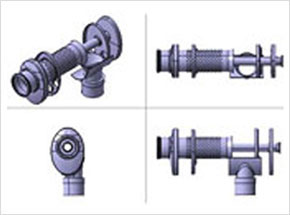
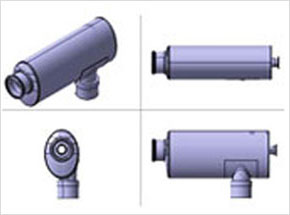


- KAAV(상륙돌격장갑차) 주기관(400BHP 커민스 디젤엔진)용 Exhaust Muffler
- 소음저감 성능 : -15dB(흡입공기 유량 1000±100SCFM, 배기온도 900~1150°F 조건)
- 배압 및 진공압 성능 : 50.8mmHg 미만 / 965.2mmAq 이상(엔진 최 대출력, stall 조건)
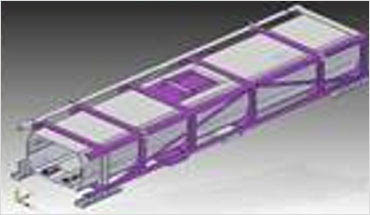
K56 컨테이어장치 개발





견마형 로봇 차체구조물 개발
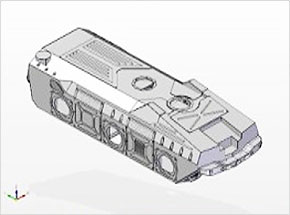







- 야지 및 험지에서 무선 네트워크 기반 지능에 의해 감시정찰, 위험물 탐지, 물자수송 등의 임무를 수행하는 다목적 견마형 로봇의 차체개발
| 항목 | 요구사항 | |
|---|---|---|
| 차체 구조물 | 기능 및 공간설계 | 야지실험이 가능한 견고한 장치 기능 보유 자율주행에 필요한 센서류 및 탑재장비 장착이 가능 하도록 형상/공간적 요구조건 만족 설계 |
| 냉방용량 | 인터 페이스 중량 | 3기구적/전기적 인터페이스 가능토록 설계 중량- 마운트 및 냉각팬 등을 포함한 구조물 총중량은 200kg 이하로 설계 |
차기전술유도미사일 발사관 개발